Danfoss inverter applications in tubular stranding machines
摘要:本文介紹了丹佛斯FC300系列變頻器��,配合MCO305運(yùn)動(dòng)控制選件��,在管式絞線機(jī)上的應(yīng)用���;并簡(jiǎn)述了開發(fā)過程。
關(guān)鍵詞:丹佛斯變頻器 MCO305 管式絞線機(jī)
Abstract: This article introduced Danfoss FC300 series inverter applications in tubular stranding machines with MCO305 motion control option, and its development process.
Keywords: Danfoss Inverter MCO305 Tubular stranding machine
引言:管式絞線機(jī)絞線機(jī)是一種能廣泛應(yīng)用于各類軟/硬導(dǎo)體線(鋼絞線�、鋁絞線及銅絞線等)及電子線(如:電源線、耳機(jī)線等)的絞合機(jī)械設(shè)備,使多根單支導(dǎo)體扭成一股��,達(dá)到線材的工藝要求����。其控制關(guān)鍵在于需要絞籠轉(zhuǎn)速和牽引輪轉(zhuǎn)速保持高度同步。
一����、工藝介紹:
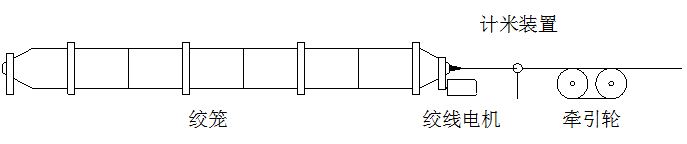
6+1型管式絞線機(jī)的主要機(jī)械結(jié)構(gòu)如下圖所示:
其中:
1.絞籠:內(nèi)部裝有放線搖籃,將要扭絞的線盤安裝在搖籃上����,絞籠轉(zhuǎn)動(dòng)將這些線纜扭絞在一起,絞籠由絞線電機(jī)帶動(dòng)�����。絞籠由無縫鋼管成型���,重量可達(dá)數(shù)噸,工作轉(zhuǎn)速可達(dá)500 RPM至750 RPM�。
2.牽引輪:在絞籠轉(zhuǎn)動(dòng)的同時(shí),牽引電機(jī)帶動(dòng)牽引輪轉(zhuǎn)動(dòng)���,并且牽引電機(jī)需要根據(jù)節(jié)距(pitch)的設(shè)定按照一定的同步系數(shù)與絞線電機(jī)保持同步�。
3.計(jì)米裝置:扭絞后的線纜穿過計(jì)米裝置,帶動(dòng)計(jì)米輪轉(zhuǎn)動(dòng)的同時(shí)出發(fā)計(jì)米輪上的接近開關(guān)��,以實(shí)現(xiàn)計(jì)米�����。
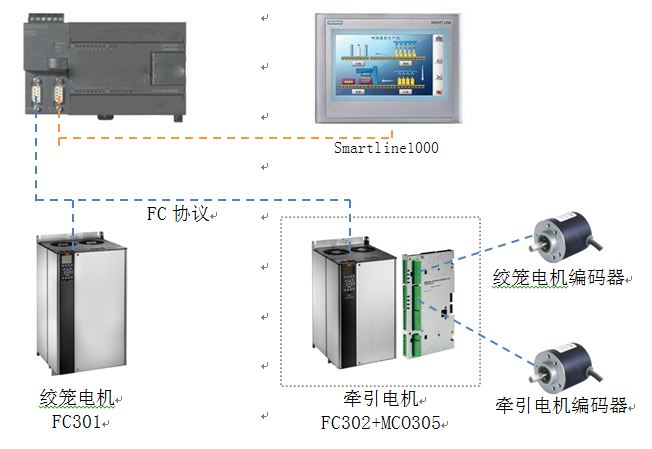
二�����、主要電氣部件配置
Danfoss FC301 75kW*1
Danfoss FC302 37kW + MCO305*1
Siemens S7-224XP 擴(kuò)展8DI��、8DO*1
Siemens Smartline1000*1
PLC的PORT1口與兩臺(tái)變頻器在一個(gè)總線上���,采用FC協(xié)議進(jìn)行通信���;PORT0則連接西門子的人機(jī)屏。其中牽引電機(jī)變頻器FC302上�,安裝MCO305選件卡,同時(shí)將兩個(gè)電機(jī)的編碼器都接到MCO305上�。由絞籠電機(jī)作為主軸,牽引電機(jī)作為從軸與主軸同步運(yùn)動(dòng)�。
三、開發(fā)過程:
1.變頻器需要的參數(shù)確定:
為了實(shí)現(xiàn)高精度的同步控制,兩個(gè)變頻器都必須在1-**參數(shù)中正確設(shè)置電機(jī)的各個(gè)參數(shù)��,并進(jìn)行完整的AMA(電機(jī)自適應(yīng))��;設(shè)定FC301變頻器的電機(jī)控制方式為速度閉環(huán)控制���,并選擇反饋來源為選件卡上的編碼器�;除此之外����,需要優(yōu)化的參數(shù)還包括:轉(zhuǎn)矩和電流、最高轉(zhuǎn)速的限制�����,PID控制器的參數(shù)����,通信參數(shù)���,發(fā)生故障后的處理方式等�。
2.同步的實(shí)現(xiàn):
要實(shí)現(xiàn)牽引變頻器的同步運(yùn)動(dòng)��,除了完成以上的參數(shù)設(shè)置外,還需要兩個(gè)條件:同步命令信號(hào)和電子齒輪比�����。
對(duì)于同步命令信號(hào)���,指定變頻器或同步卡上的任意DI口作為同步命令信號(hào)口��,在Aposs軟件中為MCO305編寫程序��,程序中還包括了手動(dòng)動(dòng)作��、報(bào)警處理等內(nèi)容��。當(dāng)變頻器得到該同步命令信號(hào)后��,便會(huì)開始進(jìn)入同步運(yùn)行狀態(tài)�。
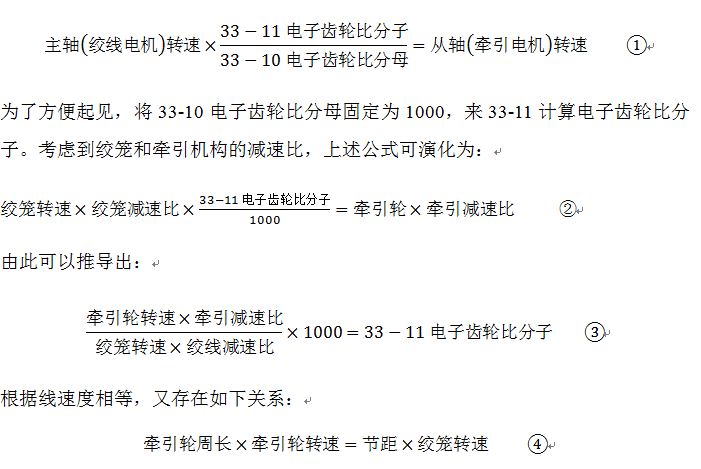
對(duì)于電子齒輪比��,它由變頻器的中33-10(Sync Factor Master���,電子齒輪比分母)和33-11(Sync Factor Slave�����,電子齒輪比分子)共同組成�。計(jì)算公式為:
其中,絞籠轉(zhuǎn)速��、節(jié)距由操作者給出����,牽引輪周長(zhǎng)、牽引減速比和絞線減速比取決于機(jī)械結(jié)構(gòu)���,由以上公式④推導(dǎo)出牽引輪轉(zhuǎn)速并帶入公式③����,即可求出電子齒輪比分子�����,在計(jì)算的過程中須保證單位統(tǒng)一�����,計(jì)算出的電子齒輪比分子轉(zhuǎn)化為整數(shù)并通過FC協(xié)議寫入FC302的33-11參數(shù)��。
3. 減速過程:
當(dāng)檢測(cè)到機(jī)器發(fā)生故障或急停按鈕被按下時(shí)����,需要機(jī)器以最快速度完成停車,這種情況下同時(shí)進(jìn)行電氣制動(dòng)(制動(dòng)電阻)和機(jī)械制動(dòng)(氣動(dòng)抱閘)�;當(dāng)產(chǎn)量即將達(dá)到是,停車過程為——先通過電氣制動(dòng)將絞籠轉(zhuǎn)速降低至某一設(shè)定值���,然后再投入機(jī)械抱閘�。在實(shí)際開發(fā)中�����,為了實(shí)現(xiàn)最佳的制動(dòng)效果�,需要合理分配電氣制動(dòng)和機(jī)械制動(dòng)所承擔(dān)的制動(dòng)工作量,防止制動(dòng)電阻嚴(yán)重發(fā)熱使得控制柜內(nèi)溫度過高�,也要防止機(jī)械制動(dòng)機(jī)構(gòu)耗損過快。
無論采用何種停機(jī)方式�����,在制動(dòng)過程牽引輪均要和絞籠保持同步����,以防止絞線節(jié)距改變或發(fā)生斷線。
4. 電磁干擾問題:
開發(fā)過程中�����,發(fā)生絞線變頻器使能后牽引電機(jī)亂動(dòng)的現(xiàn)象,檢查發(fā)現(xiàn)使能后��,來自主軸編碼器的反饋脈沖數(shù)持續(xù)增長(zhǎng)�,而此時(shí)主軸并沒有轉(zhuǎn)動(dòng)。因?yàn)楸狙b置變頻器功率較大��,且都安裝在同一個(gè)電氣柜內(nèi)�����,產(chǎn)生了電磁干擾問題�����。根據(jù)現(xiàn)場(chǎng)情況采取相應(yīng)措施���,問題得以解決���。
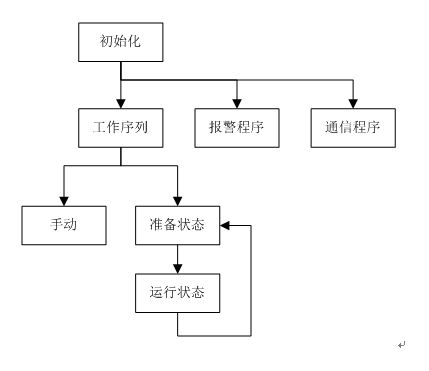
四、程序結(jié)構(gòu)
開機(jī)后����,首先進(jìn)行通信和狀態(tài)的初始化�。初始化完成后同時(shí)調(diào)用工作序列�����、報(bào)警和通信子程序����。工作序列中�����,包含手動(dòng)和自動(dòng)兩種狀態(tài)�,自動(dòng)運(yùn)行又包括機(jī)組準(zhǔn)備(包括:松開機(jī)械抱閘、關(guān)閉防護(hù)門等動(dòng)作)和機(jī)器運(yùn)行兩個(gè)狀態(tài)����。報(bào)警程序用于對(duì)機(jī)器狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)控,并根據(jù)故障情況執(zhí)行相關(guān)動(dòng)作���。通信程序用于PLC和變頻器的FC協(xié)議通信���。
五、結(jié)語
現(xiàn)場(chǎng)實(shí)際運(yùn)行過程中��,完善的參數(shù)設(shè)置選項(xiàng)和監(jiān)控功能保證了設(shè)備運(yùn)行平穩(wěn)高效。系統(tǒng)調(diào)試也十分簡(jiǎn)單易行��,得到客戶的一致好評(píng)�。
參考文獻(xiàn)
[1] MCO305 操作說明. MG.34.K1.41. Danfoss
[2] S7-200可編程控制器系統(tǒng)手冊(cè). A5E00307992-04. Siemens
聲明:
本文版權(quán)為上海津信變頻器有限公司所有,如需轉(zhuǎn)載請(qǐng)注明出處�。
獲取更多幫助和支持,請(qǐng)登陸上海津信變頻器有限公司網(wǎng)站 www.kundaxny.cn 或撥打上海津信變頻器專業(yè)服務(wù)中心7/24技術(shù)支持熱線400-888-6560����,隨時(shí)與我們聯(lián)系。
?